TTK4155: Embedded and Industrial Computer Systems Design
$$
\newcommand{\dt}{\,\mathrm{d}t}
\newcommand{\dx}{\,\mathrm{d}x}
\newcommand{\dy}{\,\mathrm{d}y}
\newcommand{\dh}{\,\mathrm{d}h}
\newcommand{\pt}{\partial t}
\newcommand{\px}{\partial x}
\newcommand{\py}{\partial y}
\newcommand{\QEDA}{\hfill\ensuremath{\blacksquare}}
\newcommand{\QEDB}{\hfill\ensuremath{\square}}
\newcommand{\R}{\mathbb{R}}
\newcommand{\Q}{\mathbb{Q}}
\newcommand{\bmat}[1]{\begin{bmatrix}#1\end{bmatrix}}
\renewcommand{\vec}[1]{\mathbf{#1}}
$$
# Embedded computer systems
### What is an embedded computer system?
An embedded computer is generally a part of a larger system, where the computer itself is not the main purpose. It is designed to to a specific tast, and is optimized to do so. The computer is programmable, but is not a general purpose computer like a PC, tablet or workstation.
### Peripherals
#### What is a peripheral?
A peripheral is some sort of device or computer hardware used to:
- Send data from the user to the computer
- Typically a computer mouse, buttons, touchpad, keyboard, webcam, scanner etc.
- Send data from the computer to the user
- Monitors, printers, speakers etc.
- Both of the above
- Touchscreens
- Store data
# Power supply
### Linear vs. Switching voltage regulators
Intergrated circuits rely on a steady power source to maintain its preformance. By using a voltage regulator it is possible to remove alot of ripple and noise from the source signal. Voltage regulators can be divided into two main categories: linear and switching.
#### Linear
* $-$ Poor thermal performance
* $-$ Power inefficient
* $+$ Can have low dropout voltage
* $+$ Cheap
#### Switching
* $+$ Power efficient
* $+$ Good thermal performance
* $-$ Expensive
### Linear voltage regulators
#### LDO
Low dropout regulator uses an amplifier and a transistor to regulate the voltage. When the output voltage differs from the desired reference the error is amplified, increasing the conductance of the transistor and increasing the voltage level on the output.

### Switching regulators
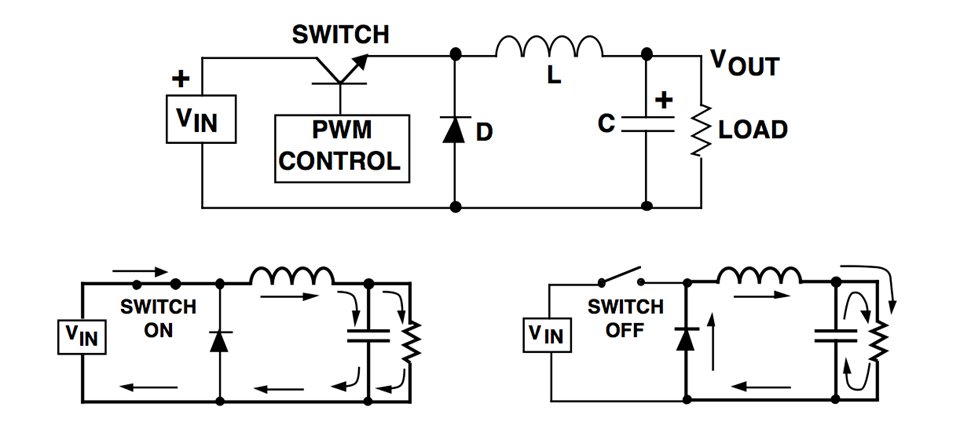
#### Buck regulator
Uses a transistor as a switch to connect and disconnect the input to an inductor. When the switch is on, the current passing through the inductor makes it store energy by inducing a magnetic field. The inductor opposes changes in current, so when the switch is opened, it then dumps its energy storage back into the circuit. A capacitor also contributes to smooth out the ripple produces by the switching.
# Processors and architectures
## Microcontrollers
#### Polling
Continuously checking the device's status registers. It's also called busy waiting and wastes the processor's time, but is simpler to implement.
#### Interrupts
Diverting the processor from normal program execution to handle an event, e.g. from a I/O device. This frees the processor from having to continuously checking I/O devices (polling). When an interrupt occurs, the processor saves it state by pushing its registers and program counter to the stack (or to shadow registers). An interrupt vector is then loaded, pointing to an interrupt service routine that is executed, ending with a _Return from interrupt_ instruction, at which point the processor continues its normal operation.
The interrupts are often prioritized according to how time critical they are.
- Polling interrupts: only one interrupt line, requiring the processor to check which peripheral the interrupt came from (requires a small number of peripherals).
- Vectored interrupts: several interrupt lines, one for each peripheral.
- Fast interrupt: Only saving the program counter during ISR, assuming the registers will be perserved. Useful when I/O devices require fast response from the processor.
## Processor design
#### RISC - Reduced instruction set computing
RISC is a CPU design based on a very simple instruction set. The instructions are optimized for specific tasks, and is made so that each task of the instruction only takes one clock cycle for the processor to complete. The register set of a RISC processor is generally very large, because of the simplicity of each instruction.Generally like this:
1. Fetch
2. Decode
3. Execute
4. Memory access
5. Writeback
We see that the CPI (Cycles per instruction) of this sequence is 5, but this may of course be reduced down to 1 by pipelining(//Add ref//), and further reduced by adding additional execution-units. We generally see RISC preocessors have an CPI of 1-2.
RISC processors are very energy efficient and are therefore very popular in mobile devices. The downside of RISC processors is that they require a lot of coding by the programmer. Precise code may however lead to less complicated electrical components, and we may say that the RISC processor is software oriented (at least more software oriented than CISC).
#### CISC - Complex instruction set computing
CISC is looked upon as the "opposing" architecture to RISC. They have a very small instruction set compared to RISC, but thier instuctions are able to do a lot more. They are very popular due to their simplicity: one does not have to "Hard-code" everything. Due to this they are very much used in personal computers and workstations.
### Memory
### Memory access
##Von Neumann architecture
Architecture used in most modern computers. The steps taken are governed by sequential control of a program. Instructions and data share the same linear memory space. And there is actually no distinction between instructions and data, they are both stored as binary numbers. They only differ in the way the are used, as instructions are executed by the processor and data is manipulated. The data is also not separated by type, and could just as well be a character as a image pixel intensity.
### Memory-mapped I/O
Memory mapping:
- I/O devices using the same linear adress space as memory.
- The opposite is called ported I/O, and is less common.
##Harvard architecture
Program memory and data memory are seperated (with seperated adress, data and control buses). Some advantages over Von Neumann:
- Instruction and data fecth can happen at the same time
- Size of instruction set not set by the size of the standard data size
##Buses
Group of signal lines having a related purpose. Most processors have a three-bus architecture. It points to an adress in memory on the adress bus. The data bus is used for reading and writing to memory. Finally, the control bus carries information to and from the processor about the state of the access; if it is a read or write, if there's an adress error or inputs to the processor like reset, interrupts, clock, etc.
##Address decoding
Processor points to an adress that it is trying to access, carried by the address bus. External circuitry determines in which device this memory location exists, and activates it.
##Arithmetic Logic Unit (ALU)
Performes an operation one or more operands, obtained from registers (or registers and memory locations). Control inputs decide the type of operation (addition, AND, XOR, left shift, ...) and status outputs provide special attributes about the operation, which can be used to control the program flow.
# Communications
## Network
### CAN
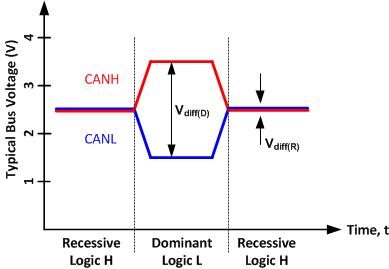
Controller Area Network is a bus standard developed by Bosch. It is wery robust and therefore used alot in projects where conditions of operation may vary. The network consists of two wires terminated at both ends by $120 \Omega$ resistors. One wire contain a low voltage signal ($0V-2,5 V$) and the other a
high voltage ($2,5V-5V$). Logic highs and lows are represented in as shown in the figure below.
#### Message frame
A CAN message data frame is a sequence of bytes and bits where different parts have different functions. At the start of the frame is the message ID, this is used by each node on the bus to determine what to do with the message. If the ID matches the nodes ID it can procede to decode the message. The CAN protocol is so that the message with the lower ID gets prioity on the buss. This is made possible by the dominace of the logic high's and low's.
After the message ID some controll bits are sent on the bus. Here is spesifies how many bytes of data the message contains. After this the data is transmitted in byte sized packs, up to a total of 8 bytes. The module then sends some CRC bits to check for errors before it ends the message with a series of high bits.

#### Error handling
An error can occur from different sources. Lets just generalize them into receive and transmit errors. The CAN module handles errors by counting them in two counter registers. One for transmits and one for receives. Every time a valid error happens the corresponding counter is increased. After one of the counters reach 127 the module goes into a _error passive_ state where the node gets restricted rights for using the bus. After a counter reaches 256 the node goes into a _bus off_ state where it is not allowed to transmit on the bus. The node can return to normal operation by resetting the counters.
## Wireless communication
# Analog-Digital interfaces
## ADCs
#### Successive approximation ADC
This type of ADC compares the input voltage to the comparison result and then updates the result depending on the comparison. A common way of SAR-logic is binary search.
For example, the input voltage is 6.3 V and the initial range is 0 to 16 V. The input 6.3 V is compared to 8 V (midpoint of the 0–16). Comparison gives less than 8 V, so the range is updated to 0–8 V. Second step, the input voltage is compared to 4 V. The comparison gives more than 4 V, so the range is updated to 4–8 V. FThird step, the input voltage is compared with 6 V. Comparison gives greater than 6 volts, and search range becomes 6–8 V. The steps are continued until the desired resolution is reached.

#### Flash ADC
Devides a referance signal into a voltage ladder, then compares each voltage step with the input signal. The comparators outputs a logic high if tthe input signal is larger than the respective voltage step. Unlike the SAR ADC, this does not need a track-and-hold device at the input because the comparators are the sampling devices.
Characteristics:
- Continous conversion (very fast). Only dependant on the switching time of the comparators and logic gates
- Not very efficiant
- Upping the resolution by one means doubling the amount of resistors and comparators
