TMA4115: Calculus 3
# Complex numbers
"A complex number is a number that can be expressed in the form $a + bi$, where $a$ and $b$ are real numbers and $i$ is the imaginary unit" -wikipedia.org
$$ i = \sqrt{-1} $$
$$ i^2 = -1 $$
$$ Re(a + bi) = a $$
$$ Im(a + bi) = b $$
## Modulus
Essentially the length of the vector from the origin to $(a, b)$.
$$|w| = |a + bi| = \sqrt{a^2 + b^2}$$
## Argument
The line from the origin to (a, b) has an angle $\theta$. This is called the argument and is denoted by arg $\theta$. The _principal_ argument Arg $\theta$ (with the _initial letter capitalized_) is the value in the interval $(−\pi, \pi]$
## Polar form
Given $r = |w|$ and $\theta = arg\:w$
$$w = r\:cos\:\theta + i\:r\:sin\:\theta$$
## Multiplication
$$ |wz| = |w||z| $$
$$ arg(wz) = arg(w) + arg(z) $$
## Division
$$ \left|\frac{z}{w}\right| = \frac{|z|}{|w|} $$
$$ arg\left(\frac{z}{w}\right) = arg(z) - arg(w) $$
## Complex form
Euler's formula:
$$ e^{ i\theta } = \cos \theta + i\sin \theta $$
Based on that formula, we can write a complex number $w$ in complex form.
$$r = |w|$$
$$\theta = Arg\;w$$
$$w = r\,e^{i\theta + 2 \pi i k} = r\,e^{i(\theta + 2 \pi k)}$$ where $k = 0, \;\pm 1, \;\pm 2, \;\dots$
## Roots
When finding the $n$th roots of a complex number $w$, we can find $n$ roots. These $n$ roots are distinct complex numbers.
For example, let's find $\sqrt[3]{w}$ where $w = 4 + 4i$. We expect to find 3 roots.
First, write $w$ in complex form:
$$ r = |w| = \sqrt{4^2 + 4^2} = \sqrt{32} $$
$$ \theta = arg(w) = tan^{-1}\left(\frac{4}{4}\right) = \frac{\pi}{4} $$
$$ w = \sqrt{32} \: e^{i(\pi/4 + 2 \pi k)} $$ where $k = 0, \;\pm 1, \;\pm 2, \;\dots$
Next comes the most important step: raise both sides to the power of $\frac{1}{3}$:
$$ w^{\frac{1}{3}} = \left(\sqrt{32} \: e^{i(\pi/4 + 2 \pi k)} \right)^{\frac{1}{3}} $$
$$ \sqrt[3]{w} = \sqrt{32}^{\frac{1}{3}} \: e^{\frac{1}{3} i(\pi/4 + 2 \pi k)} $$
Finally insert $k = 0, 1, 2$ to get the three 3rd roots of $w$ respectively.
Note: If you try to insert $k = 3$, you'll see that it gives the same root as $k = 0$
## Complex functions
$$ \cos{z} = \frac{e^{iz} + e^{-iz}}{2} $$
$$ \sin{z} = \frac{e^{iz} - e^{-iz}}{2i} $$
# Second order linear differential equations
## Linear, homogenous equations with constant coefficients
$$ y''+py'+qy=0 $$
Solve $\lambda^2+p\lambda+q=0$
### Distinct real roots
$$y(t)=C_1 e^{\lambda_1t}+C_2 e^{\lambda_2t}$$
Where $C_1$ and $C_2$ are arbitrary constants.
### Complex roots
$$z_1(t)=e^{(a+ib)t}=e^{at} [cos(bt) + i sin(bt)]$$
$$z_2(t)=e^{(a-ib)t}=e^{at} [cos(bt) - i sin(bt)]$$
$$y(t)=C_1z_1(t)+C_2z_2(t)$$
### Repeated roots
$$\lambda=-p/2$$
$$y_1(t)=e^{\lambda t}$$
$$y_2(t)=te^{\lambda t}$$
$$y(t)=(C_1+C_2t)e^{\lambda t}$$
## Inhomogeneous equations
The inhomogenous linear equation
$$ y''+py'+qy=f $$
Has the general solution:
$$ y=y_p+C_1y_1+C_2y_2 $$
Where $y_1$ and $y_2$ are solutions to the associated homogenous equation
$$ y''+py'+qy=0$$
and $y_p$ is a particular solution to the inhomogenous equation
$$ y''+py'+qy=f$$
# Vectors
A vector in this subject is always thought of as a column vector, and is written as such:
$$ \vec{v} =
\begin{bmatrix}
v_1 \\
v_2 \\
\vdots \\
v_n
\end{bmatrix}
$$
## Normalization of vectors
When we normalize a vector we are making the length of the vector $1$ (for the zero vector, with length equal to zero, this is not possible). This is an important operation in regards to steady-state vectors and computer graphics. A normalized vector is also called a unit vector.
$$ \vec{\hat{v}} = \frac{\vec{v}}{\begin{Vmatrix} \vec{v} \end{Vmatrix}} $$
Where $\begin{Vmatrix}\vec{v}\end{Vmatrix}$ is the length of the vector:
$$ \begin{Vmatrix}\vec{v}\end{Vmatrix} = \sqrt{v_1^2 + v_2^2 + \dots + v_n^2}$$
# Matrices
## Terminology
For example, when a text says _"Suppose a 4 x 7 matrix A (...)"_, that means that _m_ = 4, _n_ = 7. Can't remember the order? Rule of thumb: Just remember the word "man" and that _m_ comes before _n_. _m_ is the height of the matrix, and _n_ is the width of the matrix.
## Linear transformations
A matrix can be regarded as a transformation that transforms a vector. For example, a transformation $T$ can double the length of a 2D vector. Such a transformation $T$ and its standard matrix $A$ would look like this:
$$ T(x) = 2x $$
$$ A =
\begin{bmatrix}
2 & 0 \\
0 & 2
\end{bmatrix}
$$
### Onto and one-to-one
Let $A$ be the standard matrix of a transformation $T\; : \; \mathbb{R}^n \; \rightarrow \; \mathbb{R}^m$
- $T$ is _onto_ if and only if the columns of $A$ span $\mathbb{R}^m$. In other words, $Ax = b$ has a solution for each $b$ in $\mathbb{R}^m$.
- $T$ is _one-to-one_ if $A$ is invertible, i.e. the columns of $A$ are linearly independent.
## Inverse of a matrix
The inverse of a matrix $A$ is denoted $A^{-1}$ and is the matrix that one can multiply A with to get the identity matrix.
$$ A^{-1}A = I $$
For example, consider the following matrix
$$
A =
\begin{bmatrix}
2 & -1 & 0 \\
-1 & 2 & -1\\
0 & -1 & 2
\end{bmatrix}.
$$
To find the inverse of this matrix, one takes the following matrix augmented by the identity, and row reduces it as a 3 by 6 matrix:
$$ [\;A\;|\;I\;] =
\left[ \begin{array}{rrr|rrr}
2 & -1 & 0 & 1 & 0 & 0\\
-1 & 2 & -1 & 0 & 1 & 0\\
0 & -1 & 2 & 0 & 0 & 1
\end{array} \right].
$$
By performing row operations, one can check that the reduced row echelon form of the this augmented matrix is:
$$ [\;I\;|\;B\;] =
\left[ \begin{array}{rrr|rrr}
1 & 0 & 0 & \frac{3}{4} & \frac{1}{2} & \frac{1}{4}\\[3pt]
0 & 1 & 0 & \frac{1}{2} & 1 & \frac{1}{2}\\[3pt]
0 & 0 & 1 & \frac{1}{4} & \frac{1}{2} & \frac{3}{4}
\end{array} \right].
$$
By this point we can see that B is the inverse of A.
A matrix is invertible if, and only if, its determinant is nonzero.
## LU factorization
With this technique, you can write $A = LU$ where $L$ is a __l__ower triangular matrix with ones on the diagonal and $U$ is an __u__pper triangular matrix (echelon form). Do this only if you can reduce A without row exchanges.
First, write down the augmented matrix:
$$ [\;A\;|\;I\;] $$
Row reduce it until the left side is in _echelon form_ (not reduced echelon form). You should now have
$$ [\;U\;|\;L^{-1}\;] $$
Now, to find L, use your favorite technique for finding the inverse of a matrix.
__Why LU factorization?__
Because when $A = LU$, and you want to solve $Ax = b$ for $x$, then you can find $x$ by solving these two equations:
$$Ux = y$$
$$Ly = b$$
Each of these two equations are relatively simple, and computers are able to solve them faster than solving the more complex equation $Ax = b$
## Determinants
The determinant of a 2x2 matrix is simple to compute. Here's an example:
$$ A =
\begin{bmatrix}
a & b \\
c & d
\end{bmatrix}
=
\begin{bmatrix}
4 & 9 \\
3 & 2
\end{bmatrix}
$$
$$ det\: A = ad - bc = 4 * 2 - 9 * 3 = -19 $$
Calculating the determinant of a larger matrix is harder. Look up "cofactor expansion" in your textbook or on the internet. Moreover, here are some useful theorems related to determinants:
- If $A$ is a triangular matrix, then $det\: A$ is the product of the entries on the main diagonal of $A$.
- Adding one row of $A$ to another row of $A$ will not change $det\: A$.
- A square matrix $A$ is invertible if and only if $det\: A \neq 0$.
## Eigenvalues and eigenvectors
Eigenvalues and eigenvectors apply to square matrices.
### Eigenvalue
#### Definition
An eigenvalue is a value that satisfies this equation:
$$ A \vec{v} = \lambda \vec{v} , \vec{v} \neq 0 $$
To find the eigenvalues you evaluate the definition.
$$ A \vec{v} = \lambda \vec{v} $$
$$ A \vec{v} - \lambda \vec{v} = 0 $$
$$ (A - I \lambda) \vec{v} = 0$$
This is where $I \lambda$ is the identity matrix of $\lambda$. To satisfy $\vec{v} \neq 0$ we need to make sure the determinant to $A - I \lambda$ is equal to zero. This will yield a polynomial equation, which when solved will give the eigenvalues.
#### An example of finding the eigenvalues of a matrix
Given the matrix:
$$ A =
\begin{bmatrix}
1 & 2 \\
4 & 6
\end{bmatrix}
$$
We want to find the eigenvalues. We have from the definition that the eigenvalues satisfies this equation:
$$
\begin{vmatrix}
A - I \lambda
\end{vmatrix}
= 0
$$
We then have:
$$
\begin{vmatrix}
1 - \lambda & 2 \\
4 & 6 - \lambda
\end{vmatrix}
= 0
$$
Which then gives the polynomial
$$(1-\lambda)(6-\lambda)-8=0$$
$$\lambda^2 -7\lambda-2=0$$
The roots of this polynomial are $\frac{1}{2}(7-\sqrt{57})$ and $\frac{1}{2}(7+\sqrt{57})$, which are the corresponding eigenvalues of $A$.
### Eigenvectors
After we have found the eigenvalues, we can find the eigenvector.
The eigenvectors are the vectors that satisfy the equation:
$$(A-I\lambda)\vec{v}=0$$
Where $\lambda = {\lambda_1, \lambda_2, ..., \lambda_n}$.
### 2D rotation matrix
Given that $a$ and $b$ are real numbers, $C$ is a 2 x 2 transformation matrix that scales and rotates a vector.
$$ C =
\begin{bmatrix}
a & -b \\
b & a
\end{bmatrix}
$$
The eigenvalues of $C$ are $\lambda = a \pm bi$ and the scaling factor of $C$ is $r = |\lambda| = \sqrt{a^2 + b^2}$
Then $C$ can be rewritten like this:
$$ C =
r
\begin{bmatrix}
a/r & -b/r \\
b/r & a/r
\end{bmatrix}
=
\begin{bmatrix}
r & 0 \\
0 & r
\end{bmatrix}
\begin{bmatrix}
\cos \varphi & -\sin \varphi \\
\sin \varphi & \cos \varphi
\end{bmatrix}
$$
where $\varphi$ is the angle of the transformation $C$
## Column Space and Null Space of a Matrix
The __column space__ of a matrix A is the set Col A of all linear combinations of A. The vector $\textbf{b}$ is a linear combination of A if the equation $A\textbf{x} = \textbf{b}$ has a solution.
If $V$ is a vector space, then $dim\: V$ is the number of vectors in a basis for V.
__Rank A__ = dim Col A
The __null space__ of a matrix A is the set Nul A of all solutions of the homogeneous equation $A\textbf{x} = \textbf{0}$
### Basis
## Orthogonality
A set of vectors is orthogonal if the vectors in the set are orthogonal (perpendicular) to each other. Two vectors $u$ and $v$ are orthogonal to each other if $u \cdot v = 0$. In other words, $u^T v = 0$
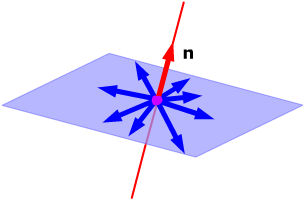
### Orthogonal complement
The set of all vectors $z$ that are orthogonal to $W$ is called the orthogonal complement of W and is denoted by $W^{\perp}$. $W$ is a subspace of $\mathbb{R}^n$, for example it is a plane in $\mathbb{R}^3$. The orthogonal complement of that plane would be the normal vector to that plane. Here's another example: If $W$ is a line in $\mathbb{R}^3$, then $W^{\perp}$ is the plane that is perpendicular to the line.
### Orthonormal set
An orthonormal set is orthogonal, but has one extra requirement: Every vector has length equal to 1.
If you construct a matrix $U$ with the vectors of an orthonormal set as columns, then $U^T U = I$. Why? Because matrix multiplication can be regarded as a set of dot product operations. Each column in $U$ dotted with any other column in $U$ will become zero, but a column in $U$ dotted with itself will become one. This also means that $U^{-1} = U^T$ if $U$ is square.
### QR factorization
If $A$ is an m x n matrix with linearly independent columns, then $A$ can be factored as $A = QR$. $Q$ is an m x n matrix whose columns form an orthonormal basis for $Col\:A$. $R$ is an upper triangular invertible matrix with positive entries on its diagonal.
You can use Gram Schmidt for finding $Q$. When finding R, you can use the fact that the columns of $Q$ are orthonormal, and thus $Q^T Q = I$:
$$ A = QR $$
$$ Q^T A = Q^T Q R $$
$$ Q^T A = I R $$
$$ R = Q^T A $$
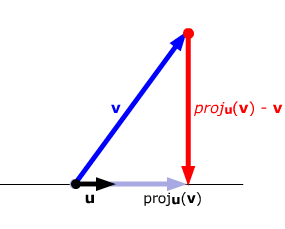
### Projection
$\hat{y}$ is the vector $y$ projected down to the line $L$ spanned by the vector $u$
$$ \hat{y} = proj_L y = \frac{y \cdot u}{u \cdot u} u $$
## Symmetric matrices
A symmetric matrix is a square matrix $A$ such that $A^T = A$.
For any symmetric matrix $A$, this is true: $A^T A = A A^T$
If $A$ is symmetric, then any two eigenvectors from different eigenspaces are orthogonal.
# Useful links
[Recap lecture (Norwegian)](http://multimedie.adm.ntnu.no/mediasite/Catalog/catalogs/ekm3.aspx)
[Course videos (Norwegian)](http://video.adm.ntnu.no/openVideo/serier/4fe2d4d3dce25)
[Second order differential equations on Khan Academy](https://www.khanacademy.org/math/differential-equations/second-order-differential-equations)
[Linear algebra on Khan Academy](https://www.khanacademy.org/math/linear-algebra)
[Official website with homework assignments, old exams etc.](https://wiki.math.ntnu.no/tma4115)